Congratulations to Junior Arroyo, Junhao Zhang, Jiaxin Zhang, Nethra Venkatayogi, Manik Kakkar! These PULSE Lab members successfully collaborated to co-publish a paper entitled In vivo photoacoustic imaging of swine ureters injected with methylene blue in the Journal of Biomedical Optics.
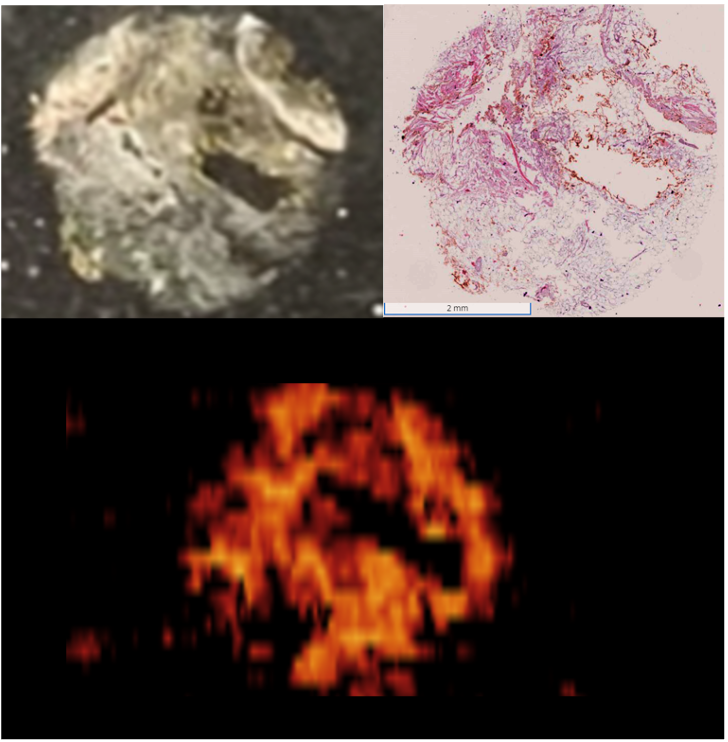
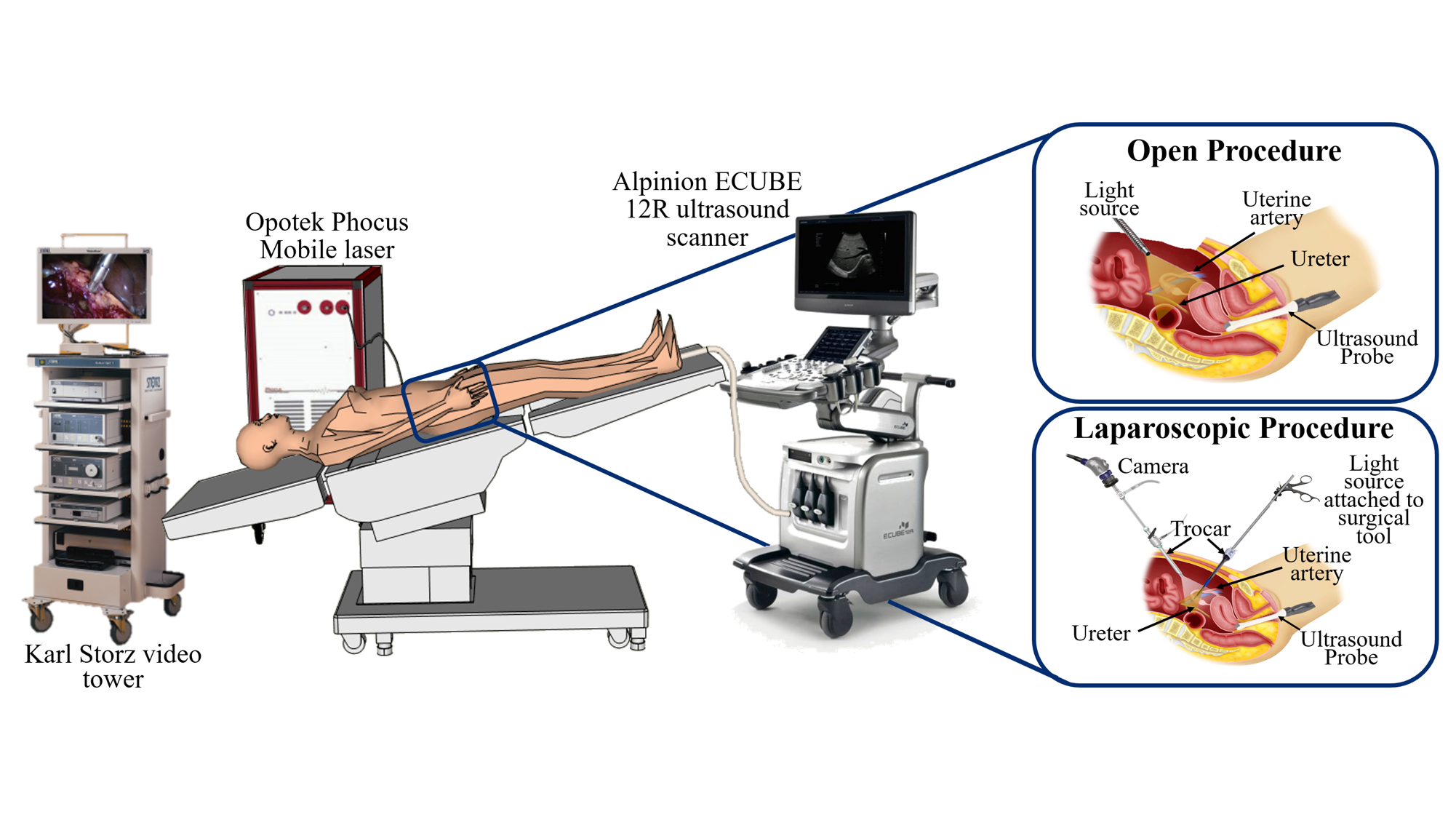
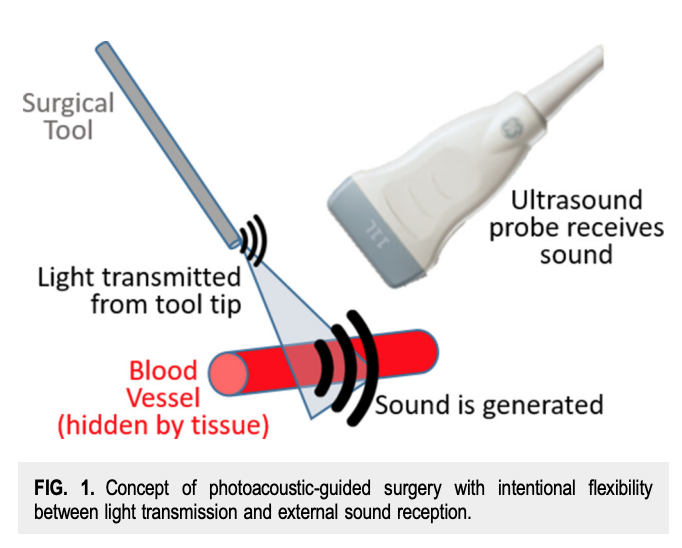
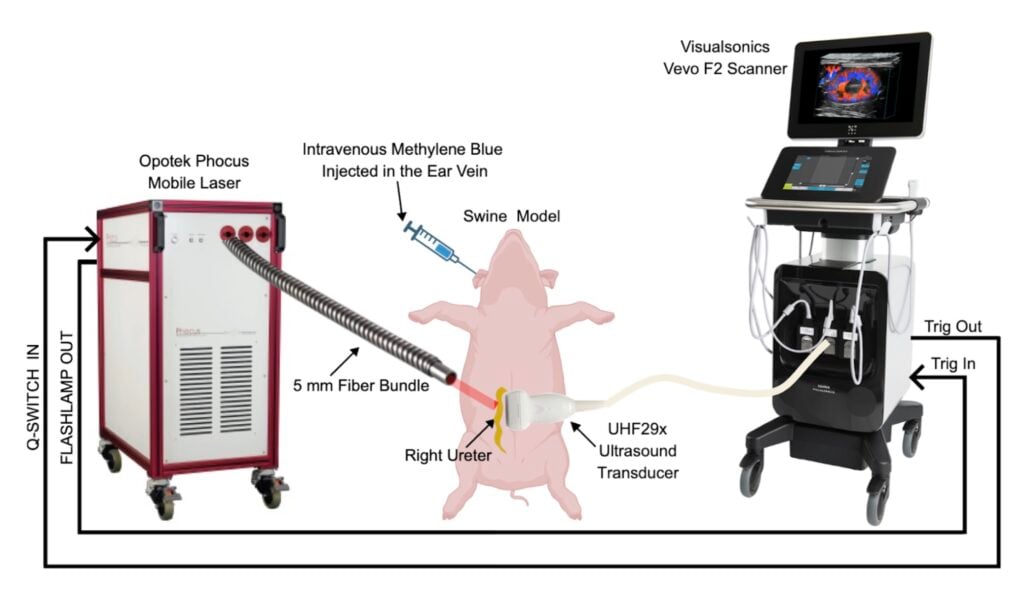
This work demonstrates the first known in vivo photoacoustic imaging of a ureter containing an FDA-approved contrast agent (i.e., methylene blue). To achieve this, an Opotek Phocus Mobile laser was integrated with a Vevo F2 ultrasound system, co-registered ultrasound and photoacoustic images were acquired. Maximum image quality was achieved 20-30 minutes after methylene blue injection with consistent ureter visibility maintained over a time duration consistent with surgical procedures. This indicates prolonged contrast agent retention and sustained imaging contrast. There was also no renal function impairment. Our findings support the clinical potential of photoacoustic-guided surgery to improve intraoperative ureter identification and reduce the risk of accidental ureteral injury.
Citation: Junior Arroyo, Junhao Zhang, Jiaxin Zhang, Nethra Venkatayogi, Manik Kakkar, Amanda Maxwell, Kathleen Gabrielson, and Muyinatu A. Lediju Bell, “In vivo photoacoustic imaging of swine ureters injected with methylene blue,” Journal of Biomedical Optics, 31(3):036004, 2026 [pdf]